Architecture
Robot architecture
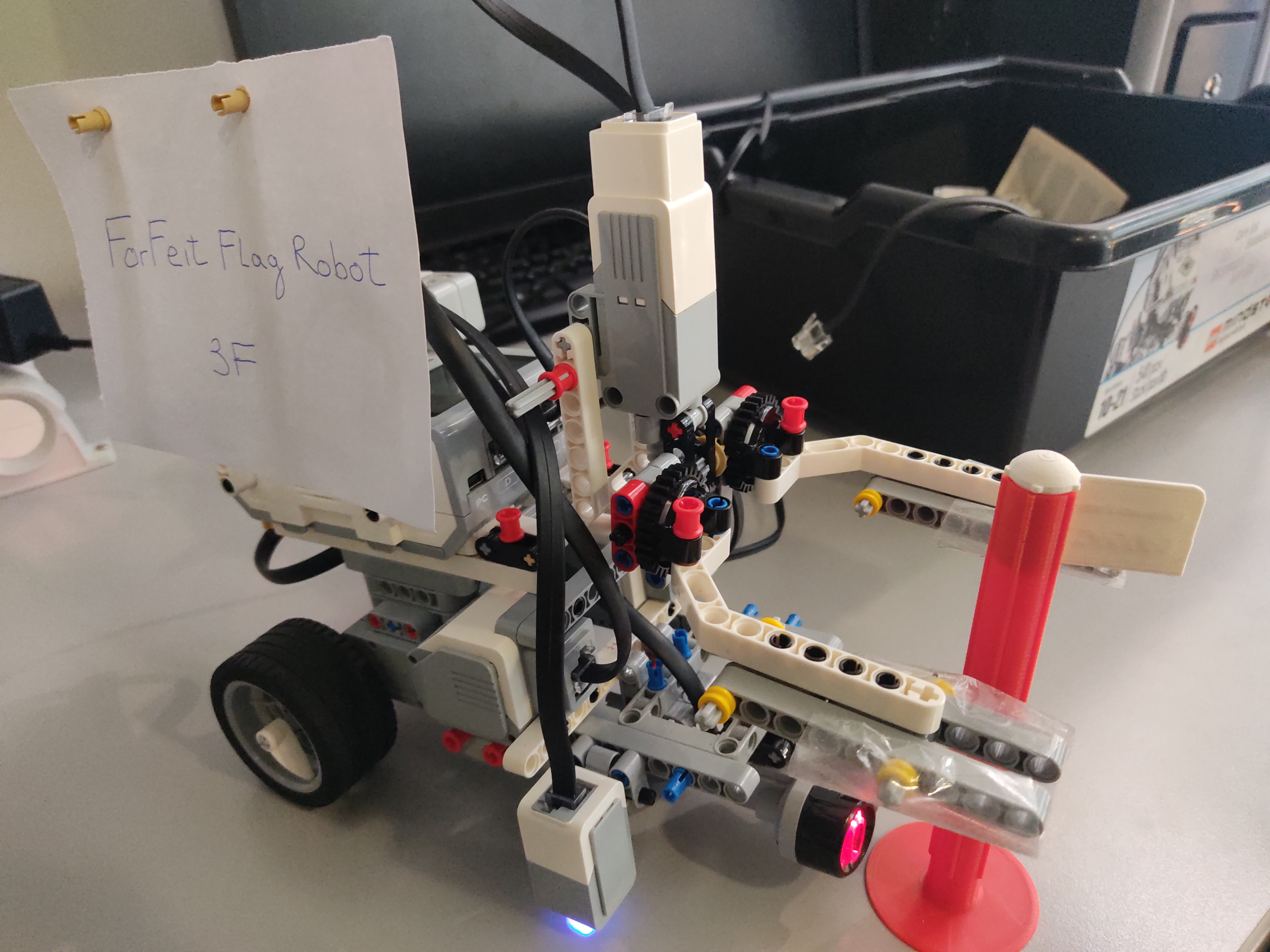
The 3F-Robot was made to capture the flag of the opposing team and return back into position while also avoiding obstacles and entering forbiden areas using different sensors for each task.
Motors
In total, we used three motors, two red ones for the wheels and one orange for the grabbing mechanism.
Red motors
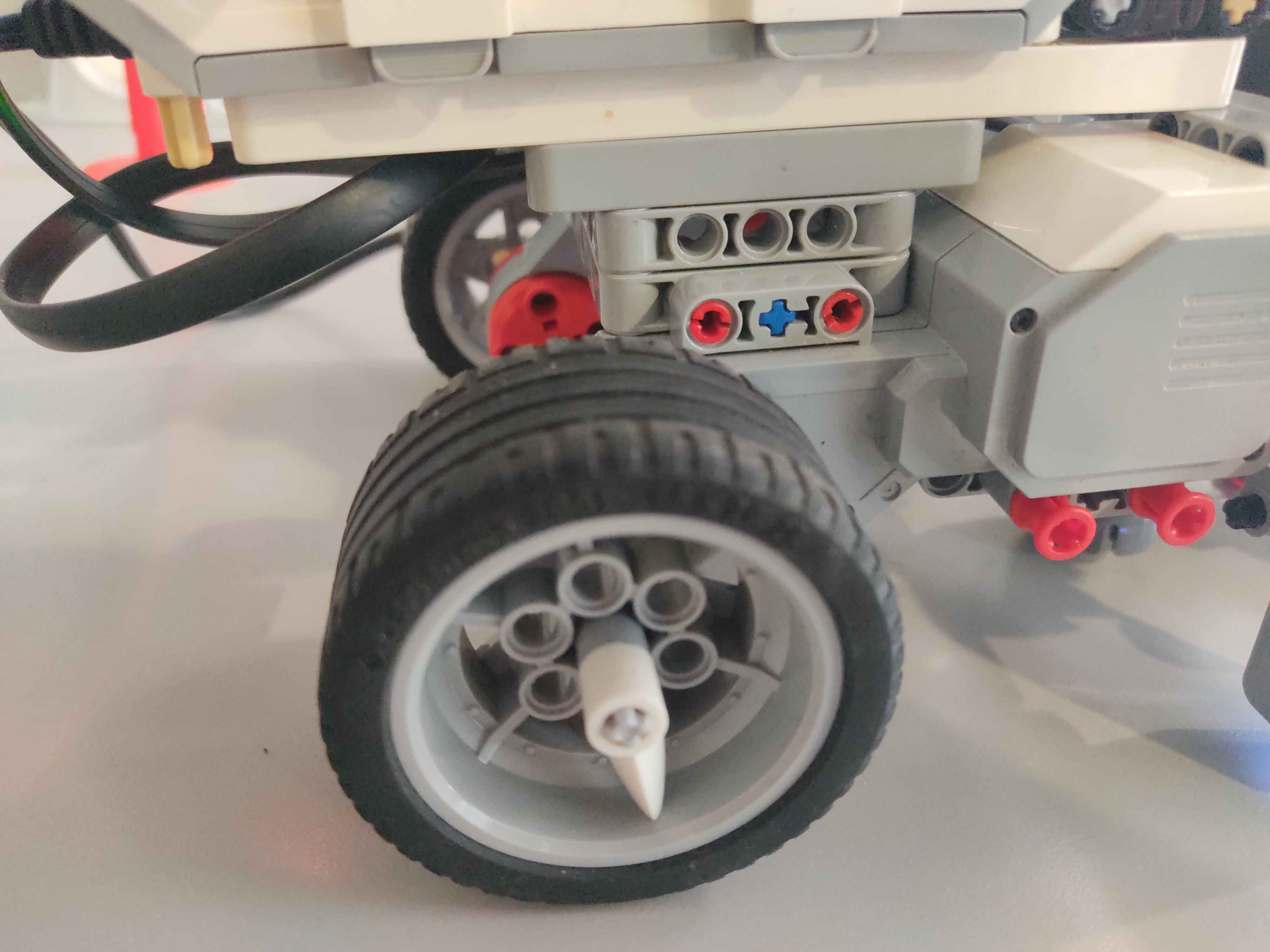
A “smart” motor with a built in rotation sensor with 1 degree resolution for precise control. We used two of these (one for each wheel). At the beginning, the ev3 brick was placed at the front of the robot thus the weight was mainly at the front of the robot making the wheels slip. We then decided to place the brick at the back (right ubove the wheels) providing the robot with better stability and centered equilibrium.
Sensors
Ultra sonic sensor (sonar)

We used this sensor to get the distance between the robot and all its surroundings (obstacles, edges of the stadium, the flag, centering …) . The sensor was placed quite low on the robot, which is why it was imperative for the arms to always be up even after catching the flag so as to not disturb the trajectory of the sensor’s waves.
Gyro sensor

We used this sensor to get the angles to know how (rotate or go straight) and where (left, right, back, front). The gyro sensor also keeps track of the total rotation angle in degrees, we use this to know how far the robot has turned as well as to program turns with an accuracy of +/-3 degrees for a 90 degree turn.
Color sensor
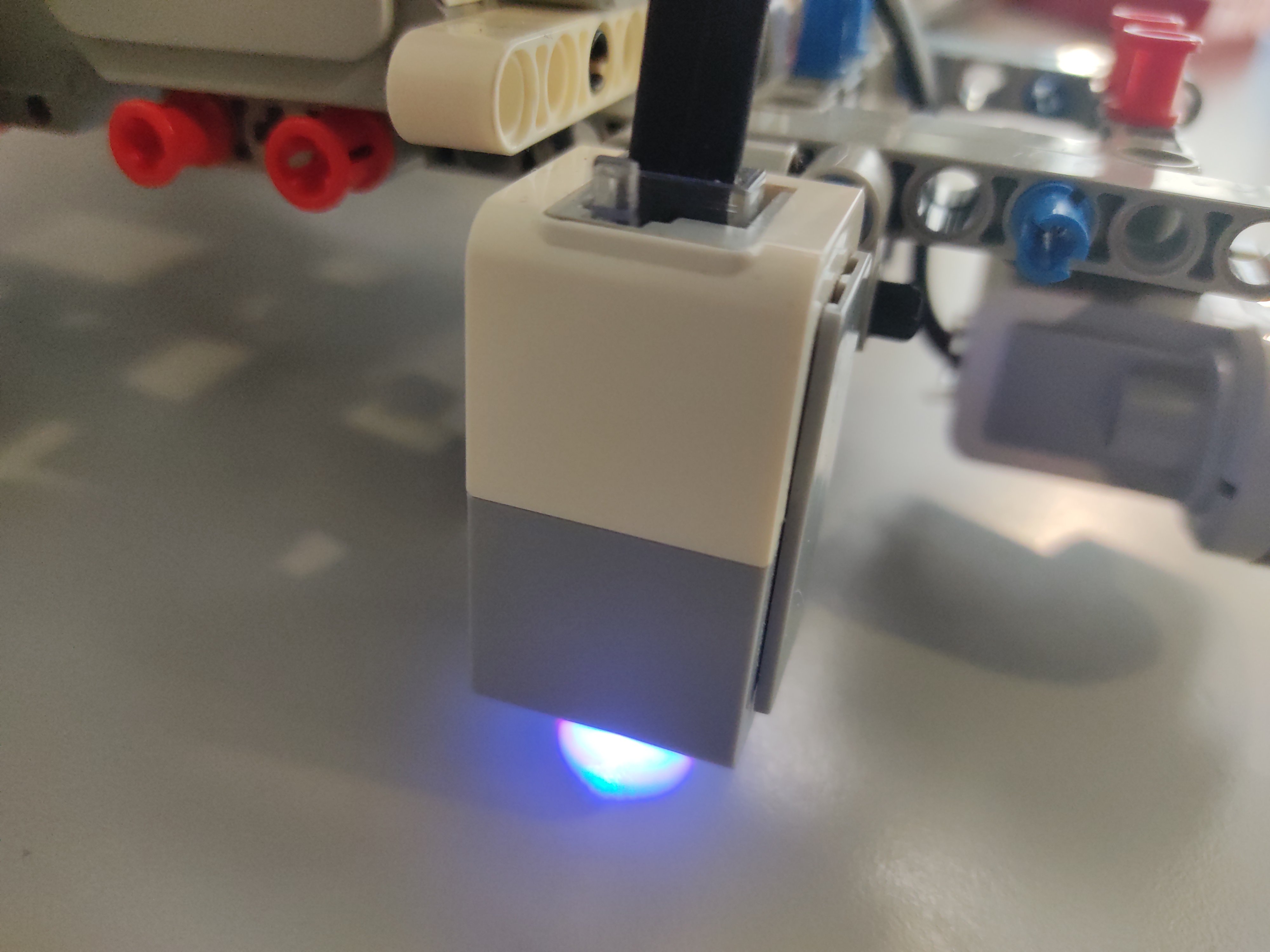
We used this sensor to know in which zone the robot is currently at with the help of the line on the floor of the stadium. With many modes avilable, we chose COLOR MODE that recognizes seven colors. We only use it detect the green/yellow flag that we use for the centering protocol on the outbound trip and on, and to slow down on the return trip to drop the flag gracefully.
Grabbing Mechanism
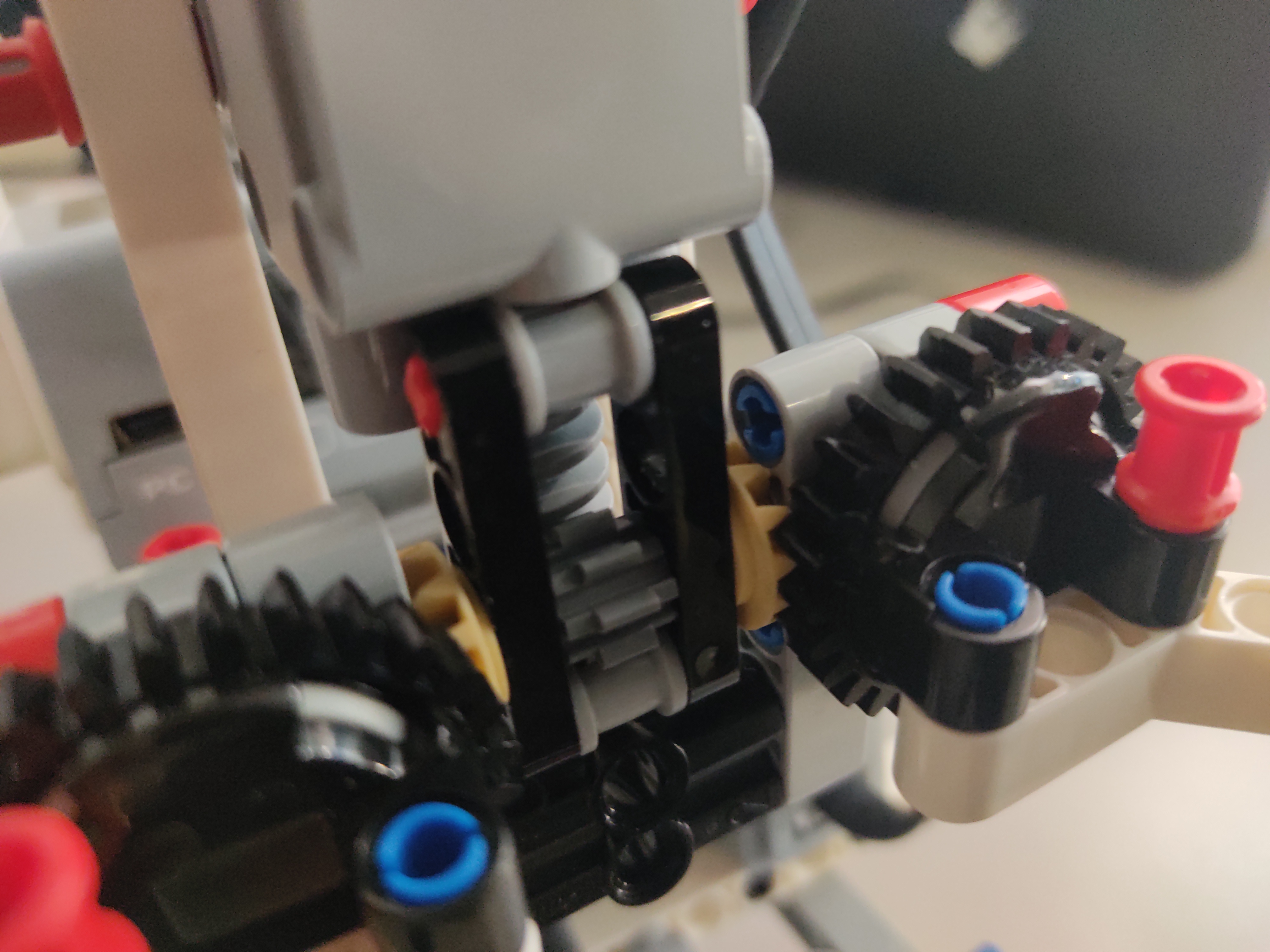
Powered by one motor, open and slowly close with the flag inside, then go up to avoid dropping the flag or touching obstacles on the groud of the arena. When the robot is back in the zone where the flag should be deposited, the lego arms open and the flag is carefully set back. At first we used one lego arm on each side, but opted later on for two to provide higher surface of grip. And then to increase the friction, we added scotch to the inside of the lego arms. All for a lower chance of the flag slipping.
It uses 3 gears to achieve the desired movement. One gear is attached to the motor axis and two others attached to the arms. This way, we can achive grabbing and lifting with only motor.